スマホのセンサーで屋内位置測位
こんにちは!イーアールアイの梁川です。
イーアールアイでは、これまでに様々なセンサーを搭載した組み込み機器の開発に携わってきました。また、それらセンサーから得られる情報を使用して、人や物体の動きを捉えるための技術深耕にも継続的に取り組んでいます。
今回の記事では、それらの活動の中から、人の歩行による移動を検知して相対位置を知ることが出来る『PDR』という技術についてご紹介します。
屋内における位置測位技術について
PDRの話に入る前に、位置測位技術についておさらいしておきましょう。
屋外における位置測位においては 、GPSを始めとする人工衛星によって地上の現在位置を決定する GNSSのような衛星測位が一強な状態となっています。
一方で、衛星測位では対応できない屋内位置測位に関しては、未だに乱戦状態が続いていて、要求される精度や設備にかけられるコスト、計測するエリアの環境などによって様々な手法が提案されています。
ビーコン測位
専用の受信機やスマートフォンでビーコン情報を読み取り、屋内位置測位を行う手法です。
使用する無線技術に依存するため、信号の到達距離は10m~100m程度、精度は1m~数m程度といわれています。 ビーコンから発せられる信号強度から現在の位置を推定するため、周辺に設置されている物による電波の反射や、電波への干渉によって影響を受けて誤差となる可能性があります。
UWB測位
UWBは「Ultra Wide Band」 の略で、超広帯域無線を意味します。
従来より近距離であればcm単位での高精度な測距ができるとされていましたが、専用のUWB受信タグを使用しなくてはならずコストが掛かります。
しかし、iPhone11以降で採用されるということで一般への普及率が上がることから
再び注目されはじめている手法の一つです。
地磁気測位
建物に使われている鉄骨などの鋼材が磁界を帯びて、周囲の地磁気に影響を与えるため、場所ごとで計測された地磁気の大きさや方向は異なるデータとなります。
目的とする場所の地磁気マップデータを事前に計測しておいて、現在の地磁気データとマッチングして位置測位を行う手法です。
その精度は高く数m程度と言われていますが、事前に地磁気マップ作製の手間が掛かったり、帯磁または磁界を発生してしまう物を後から設置したり、近くを電車などが通過すると地磁気の計測に影響してしまい正しい測位が困難になってしまいます。
カメラによる画像認識
カメラで撮影された映像を解析することで、現在の位置を検出する手法です。
事前のマーカー設置などが必要であったり、各地点の特徴となる情報を取得するための
事前準備が必要となります。
映像のマッチングで位置を検出するため、設置したマーカーや特徴となる部分が
遮蔽されてしまったり変わってしまうと測位が困難になってしまいます。
PDRとは何ぞや?
加速度センサーや角速度センサーを利用し、人の歩行を検知して測位を行う技術のひとつで、
歩行者自律航法 Pedestrian Dead Reckoning(以下、PDR)の略です。
前述で説明した方法と違い、瞬間的なデータで現在位置を求めるのではなく、
基準となる位置からの積み重ねで現在の位置を推定する相対位置を求める方法となります。
<メリット>
・昨今のスマートフォンの普及から、個人が所有するデバイスをそのまま使用できる
・人が所持するデバイスのみで演算が可能であるため、ビーコンやUWB測位のような
送信デバイスの設置コストを抑えることができる
<デメリット>
・移動した量を積算しつづけるているため、誤差も蓄積されつづけてしまう
・一定周期毎での演算を行うために、高頻度でセンシングしなければならない
カーナビであれば、普段は衛星から得られる緯度経度情報や地図データから現在位置の補正をしていますが、トンネルの中や高層ビルに囲まれた場所など衛星からの信号が受信しづらい場所では、内蔵されているセンサーや車から得られる車速や舵角センサーを用いてPDRのように現在の位置を推定しています。
PDRのみでの位置測位では、カーナビのような現在の絶対位置座標が得られないため、蓄積され続ける誤差をキャンセルする事ができずに位置がズレたままになってしまいます。
正確な位置測位のためには、位置補正用の手法を別途考える必要があります。
加速度センサーと⾓速度センサーを使⽤した
PDRのご紹介
今回は加速度センサーと角速度センサーを使用したPDRをご紹介します。
基本的には加速度データから人の歩行のタイミングを検出して、角速度データからどちらの
方向へ歩みを進めたのかを求めていきます。
iPhone上で動作させるため、CoreMotionを用いて端末の3軸加速度データを取得しました。最短の取得間隔である100Hzでの取得データが以下になります。
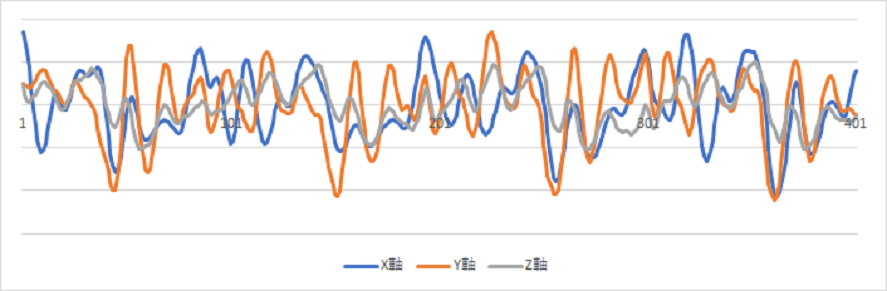
基本的には、人が地面から脚を振り上げて、再び地面に付ける際にもっとも加速度が大きく変化します。・・・が、生の加速度データの各軸の細かい体の動きなども併せて取ってしまっていて非常に分かりづらい傾向にあります。
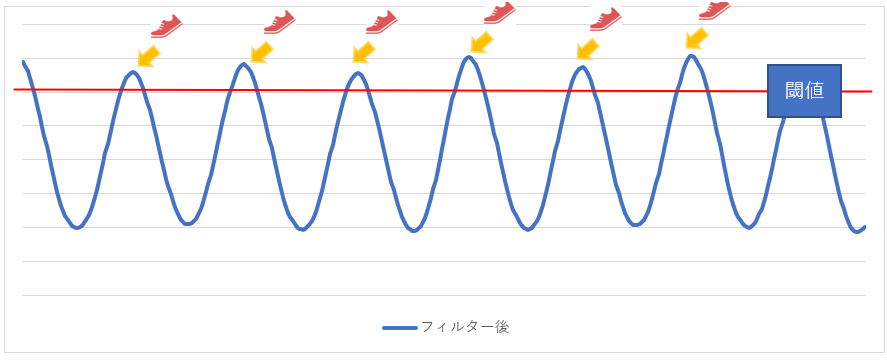
そこで、生の加速度データに対してフィルターを掛けて歩行を捉えやすくしたものが
以下のグラフとなります。(時間軸としては生値と同じ部分になります)
この加速度の波形に対して、予め決めた歩行時の判定強度の閾値以上になったものを1歩としています。この閾値設定については歩き方や靴、地面の硬さなどでも変わってきます。
あとはこの歩行のデータに対して、角速度データから進んだ方向を求めて歩幅を掛けてあげると簡単な経路データの完成となります。
以下は、弊社の駐車場をテスター2名にiPhoneを携帯して歩いてもらい、計測したデータを用いてPDRを用いて得られた経路データとなります。
スタート地点を基準座標(0, 0)としたときに、コースを1周して戻ってきた際に停止した最終座標との誤差を比較した結果となります。
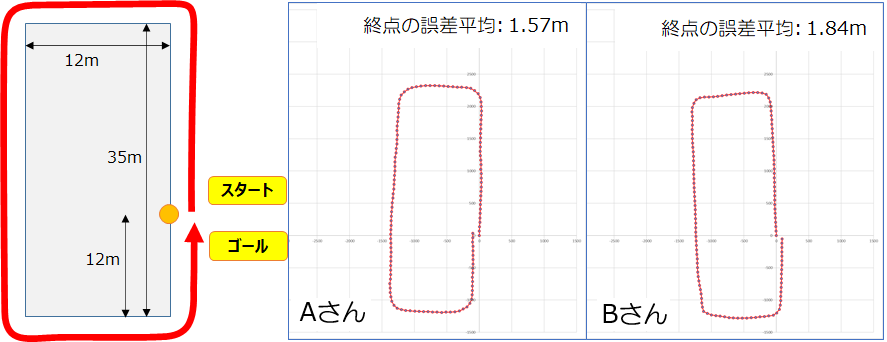
どちらの結果についても概ね基準座標の近くまで戻ってきてくれていました。
今回は計測時間が約1分程度で歩数も100歩程度と短時間であったため、誤差蓄積による影響も少なかったものと思われます。
PDR測位のデモ動画
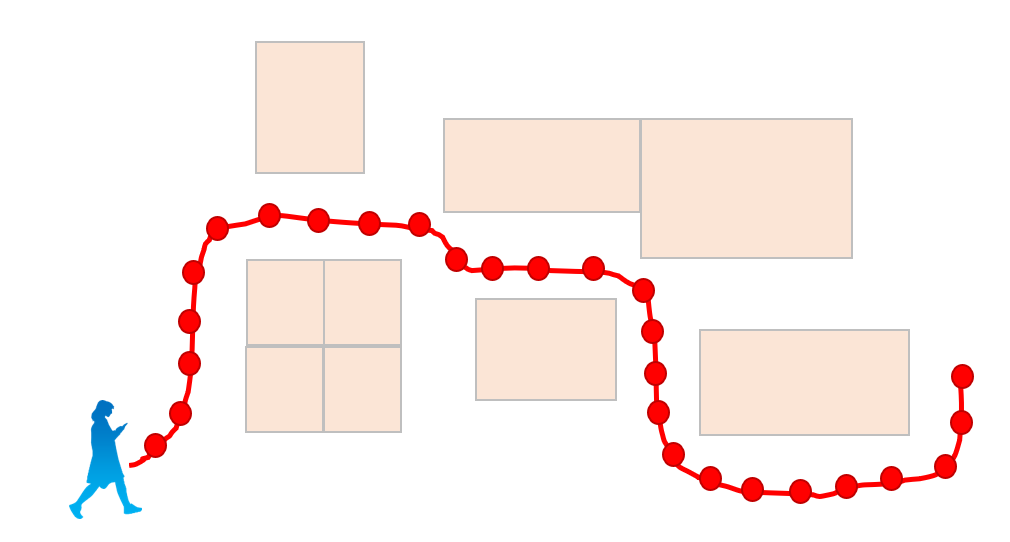
PDRの技術を実際にiPhoneアプリに組み込んで、GPS機能を一切使わずに近所の公園を歩いてみた動画をYoutubeにて公開しました。
おわりに
今回は屋内での位置測位技術について簡単に触れ、その中でも『PDR』に着目してiPhone上で動作する弊社の実績をご紹介しました。
今回はPDRのみでの非常に単純な位置測位でしたが、比較的良い結果となりました。
今後の長時間稼働のための課題としては、基準座標を補正するためのビーコンによる絶対座標取得や、地磁気センサも併せて使用して角速度センサーの誤差解消などが考えられます。
イーアールアイでは、PDRによる測位だけでなくビーコン測位による情報配信やセンサ機器の活用などにも取り組んでいます。
ご興味がございましたら、是非ともイーアールアイへお問い合わせください。
